
Common grasp search algorithm
This work addresses the problem of designing a simple End Effector for a robotic arm which is able to grasp a given set of objects. The purpose of this work is to develop an algorithm which will find a configuration and design of a universal end-effector for a set of objects. With given a set of all CAD models of the parts, the idea is to design an end-effector that is universal in the sense of being able to hold a wide set of components for multiple manipulation tasks. The algorithm will be able to characterize the objects geometries and find a configuration for grasping them. An optimal configuration is the one which can stably grasp the object even under the application of external wrench due to the task being done, i.e., we require Force-Closure grasp.
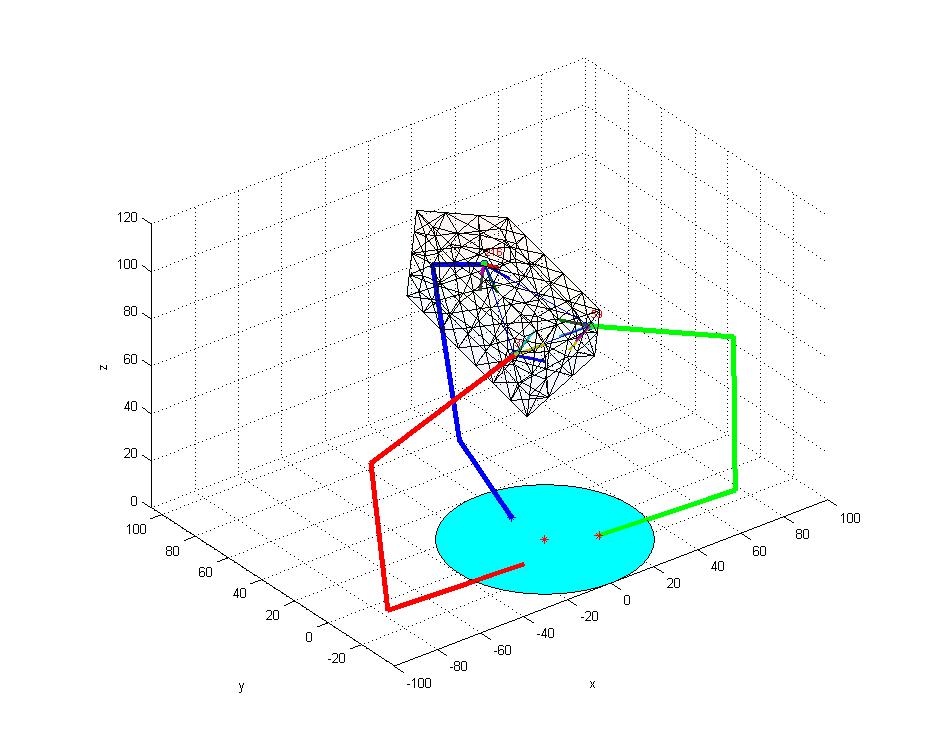
The OCOG (Object COmmon Grasp) algorithm developed, searches for a common grasp over the set of objects. The search algorithm maps all possible grasps for each object which satisfy a quality criterion. The mapped grasps are represented by feature vectors in a high-dimensional space. This feature vector describes the shape of the gripper. We generate a database of all possible grasps for each object in the feature vector space. Then we use a search algorithm for intersecting all possible grasps over all parts and finding a common grasp suitable for all objects. Each point (feature vector) is the grasp configuration for a group of objects, which implies for the future end-effector design. The final step classifies the objects to grasps found, according to the common points found. The algorithm will be useful for assembly line robots in reducing end-effector design and manufacturing time and final product cost.
This work was supported by General Motors Corp. Ltd.